

FORMAÇÃO



Nesta seção será descrita a trajetória acadêmica, desde sua formação básica até o seu pós-doutorado. Procurou-se narrar somente os fatos mais significativos do percurso docente e suas articulações com os fatores resultantes de decisões pessoais e suas consequências e/ou desdobramentos.
1. Formação Básica
No começo dos horrores de um regime de exceção instalado no Brasil, às 22h do dia 19 de dezembro de 1966, uma segunda-feira, nasceu o sexto e último filho do casal Pedro Vieira Filho e Noêmia Maria de Oliveira Vieira, no Hospital Régis Pacheco, em Canavieiras, Sul da Bahia. Mas, seu pai só o registrou no dia 01 de maio do ano seguinte, com o nome de Carlos Antonio Oliveira Vieira. O presidente do Brasil era o Marechal Humberto de Alencar Castelo Branco (1964-1967). A Bahia tinha como governador Antônio Lomanto Júnior (1963-1967) e o prefeito de Canavieiras era o médico Edmundo Lopes de Castro (1963-1967).
Carlos passou por alguns problemas de saúde até os dez anos de idade. Aos quatro anos, tinha como sonho maior ser vendedor de pipocas ou entregador de água potável nas casas, porque achava o máximo andar na cangalha de um burro ou jumento.
A partir dos cinco anos, passou a frequentar a escolinha da professora Luzia Tedesco e no primeiro dia de aula ficou fascinado, porque aprendera a letra “A” e fez amizades com Ronaldo Nonato, João e Paco Brasil, entre outros coleguinhas (Figura 1). Cursou o primeiro e segundo anos primário na escola da professora Helena Tolentino e grande parte da fase primária no Colégio Estadual 15 de Outubro. Ainda na quarta série, ficou surpreso ao ver na sala de aula sua irmã Marivone substituindo a Profa. Zélia Reis. Imediatamente se dirigiu à direção do colégio e pediu para ser mudado para a sala da Profa. Neide, a fim de evitar a proximidade com a irmã professora que, certamente, iria exercer maior controle de desempenho.
Figura 1 – Foto da escolinha de alfabetização da Profª. Luzia Tedesco.
Aos 10 anos foi cursar a 5ª série no Colégio Estadual Osmário Batista (CEOB), onde fez novas amizades (Jerônimo Alves da Paz, Davi Pedreira de Souza, Robson O. Bispo de Souza, Sérgio Casemiro, Miguel Froes, entre outros) que cativa até os dias de hoje. Na 6ª série, chegou a receber a nota zero numa prova de ciências, tendo sua outra irmã Helena como professora[1]. Teve desempenho lamentável até a 8ª série, com raríssimas exceções para as disciplinas Matemática e Desenho Técnico (ANEXO, Pag. 70). Naquela época, suas prioridades eram futebol pela manhã no colégio, e à tarde/noite na Associação Atlética Banco do Brasil, apesar de se atrapalhar um pouco na utilização do polinômio pernas, bola e mente. Daí, seus coleguinhas o colocavam sempre no gol.
Aos treze anos, pediu a sua mãe para aprender música e foi estudar na Filarmônica: Grupo Musical Dois de Janeiro, onde aprendeu inicialmente teoria musical, a tocar trompa e, posteriormente, trompete. Cosme e João Danga foram seus mestres. No dia 23 de abril de 1980 tocou pela primeira vez na Filarmônica Dois de Janeiro, em celebração ao dia de São Jorge, sendo seus coleguinhas com idade superior a 50 anos.
A partir de 1976, passou a acompanhar a mãe no trajeto de casa para a Igreja Adventista e sempre chegava um pouquinho antes do término do culto para buscá-la. Nessa época teve contato com a Bíblia e estudou as doutrinas Adventistas. Frequentou assiduamente a Escola Sabatina na classe dos juvenis da professora Selma Nonato, onde lhe foram repassados grandes conhecimentos bíblicos. Tanto na Escola Sabatina, quanto nas escolas cristãs de férias, foi se desenvolvendo espiritualmente até seu batismo na Igreja Adventista do Sétimo Dia de Canavieiras, em 25 de outubro de 1980, pelo pastor Florisbaldo Casal.
Participava ativamente das atividades da igreja, que o ajudou de sobremaneira preliminarmente a se apresentar em público, desenvolver sua oratória e inspirá-lo a seguir uma trajetória docente. As chamadas Classes Progressivas, organizadas pelo Prof. Durval França e Prof. Luiz Carlos do Nascimento (exemplo de educadores), ajudaram consideravelmente no seu desenvolvimento físico, emocional e espiritual. A primeira mensagem proferida na igreja, ainda por volta dos treze anos de idade, foi num culto de quarta-feira sob o título: “O Deus que eu conheço”. O envolvimento com o grupo da igreja despertou o gosto pela leitura, pelo esporte, pelo xadrez, e por outras atividades. Talvez este momento represente o primeiro ponto de inflexão na sua trajetória acadêmica. A partir da oitava série, assumiu o compromisso pessoal de não mais ficar em nenhuma dependência ou prova final em qualquer disciplina que cursasse. Assim prometeu e assim o cumpriu.
2. Segundo Grau
No segundo grau, optou inicialmente em fazer o curso de Magistério, mas no terceiro ano, passou no exame de seleção do curso Técnico de Agrimensura da EMARC – Escola Média Regional da CEPLAC, em Uruçuca/BA (Figura 2). Essa escolha possivelmente foi motivada por influência de excelentes profissionais egressos dessa escola: Sérgio Ramos (ex-cunhado), Luiz Carlos Souza, Elder Pedreira de Souza, como também influência do seu professor de Matemática do CEOB, Prof. Clemente Assis – que inicialmente tinha dúvidas da sua capacidade de seguir em seus estudos. Evidentemente que neste ponto houve outra mudança direcional em seu percurso acadêmico ao enveredar sua formação para um curso profissionalizante na área de agrimensura, talvez impulsionado pelas políticas governamentais[2] da época.

Figura 2 – Técnico de Agrimensura da EMARC – Escola Média Regional da CEPLAC (Atual IFBA), 1984-1985.
Durante o curso Técnico de Agrimensura, teve a oportunidade de conhecer e auxiliar o Prof. Ricardo Seixas Brites, na disciplina de aerofotogrametria e fotointerpretação, cumprindo assim parte de sua carga horária de serviços voluntários requeridos pela Escola[3]. Foi nesse período, que teve contato pela primeira vez com a área de Sensoriamento Remoto. Assim, neste ponto da sua trajetória, ainda que inconscientemente, houve uma convergência pelas descobertas de novas áreas de atuação técnica.
Além da área de Sensoriamento Remoto, a área de Cadastro Técnico Municipal lhe chamou bastante a atenção, o que possibilitou desenvolver projetos acadêmicos nessa linha de atuação, que mais tarde passaria a direcionar suas atividades de extensão. Alguns professores da EMARC-UR lhe serviram de inspiração: Jaime Araújo Santos, Omar, Hélio Santos, Efren de Moura Ferreira Filho, Eduardo César Almeida Lavinsky, Paulo Mota, Valmir do Rosário e Ricardo Seixas Brites, entre outros.
Concluiu o curso Técnico de Agrimensura com excelente desempenho (ANEXO, Pag. 68-69). Após realizar estágios em Salvador, Feira de Santana e Ibotirama/BA na Empresa Rumo Engenharia, na área de cadastro de redes de transmissão de energia elétrica, decidiu prosseguir seus estudos na Universidade Federal de Viçosa – UFV, seguindo orientações do Prof. Ricardo Seixas Brites[4]. Essa decisão foi contrária à do seu pai que preferia que ele se dedicasse as atividades na fazenda de cacau da família.
3. Graduação
Seu pai, mesmo relutante, lhe ofertou um saco de cacau para vender e cobrir as despesas com a viagem, estadia e alimentação para que ele pudesse participar de um cursinho pré-vestibular “intensivão” de um mês em Viçosa-MG. Com a recomendação do Prof. Ricardo Brites (um dos fundadores do Curso Pré-Vestibular Equipe), ocasionou uma redução da mensalidade e assim conseguiu o seu objetivo de fazer o cursinho pré-vestibular em Viçosa. Carlos foi aprovado em 2º lugar no vestibular da Universidade Federal de Viçosa para o Curso de Engenharia de Agrimensura, que iniciaria as atividades em março de 1986 (Figura 3).
Com a mudança das grades dos Cursos de Engenharia em 1985[5], entrou na primeira turma para uma grade de engenharia de agrimensura plena de cinco anos. Como o projeto político pedagógico do curso ainda estava em consolidação, por vezes cursou diversas disciplinas, como física para a área de agronomia e depois precisou refazer novamente as físicas para as engenharias plenas. Também cursou diversas disciplinas da área de solos, que faziam parte do currículo anterior, que saíram posteriormente do currículo de engenharia plena. Em sua trajetória acadêmica, Carlos decidiu acompanhar o recém-criado curso de informática da UFV, cursando disciplinas optativas de linguagens de programação, estruturas de dados e engenharias de softwares. Essas disciplinas ajudaram-no a desenvolver programas na área de agrimensura, utilizando as linguagens de programação PASCAL e MODULA 2.
Figura 3 – Graduação na Universidade Federal de Viçosa, 1986-1990.
Durante o período de 1987 e 1989, devido a suas habilidades de programação em linguagens de alto nível, foi selecionado para trabalhar como Monitor no Projeto: “Elaboração de Estudos Agrometeorológicos”, celebrado entre o PRONI e a Fundação Arthur Bernardes (FUNARBE) – no Departamento de Engenharia Agrícola e coordenado pelo Prof. José Maria N. da Costa, sob a supervisão do Prof. Gilberto C. Sedyiama (ANEXO, Pag. 570). Esses professores também foram exemplos de educadores para Carlos, principalmente por seu grande conhecimento técnico, rigor na pesquisa e sabedoria, moderada por uma dose excessiva de humildade. Entre as atividades desenvolvidas nessa monitoria, implementou diversas rotinas para o processamento de dados meteorológicos.
Carlos atuou também como representante do corpo discente junto ao colegiado do Departamento de Engenharia Civil de março de 1988 a fevereiro de 1990 (ANEXO, Pag. 571). Nesse período, teve contato com excelentes gestores e visionários, como o Prof. José Aníbal Comastri, Prof. Antônio Santana Ferraz e Prof. Paulo Tadeu Leite Arantes.
Durante a graduação, Carlos foi bolsista de alimentação e morou no alojamento masculino 831 da UFV no prédio novo, onde desenvolveu diversas amizades marcantes com os colegas: Paulo Sérgio da Silva, Francisco Cardoso, Jerônimo Alves da Paz, Antônio Mendonça Fragassi, Pedro Nunes Pereira e Ednei de Oliveira Freitas, entre outros.
Ingressou no Conjunto de Sopros da UFV, onde tocava trompa francesa (em fá) sob a regência do Maestro Rogério Moreira Campos. Aprendeu tocar flauta e violão[6], através de cursos de extensão da UFV. Participou das turmas de vôlei e karatê (Prof. José de Fátima).
Durante a sua graduação, cursou diversas disciplinas profissionalizantes, e uma das áreas que mais lhe chamou a atenção foi a de Aerofotogrametria e Fotointerpretação e Sensoriamento Remoto. Esta última lecionada pelo Prof. Celestino Aspiazú no Departamento de Engenharia Florestal, que tinha como orientando de mestrado o seu professor do curso técnico em agrimensura, Ricardo Seixas Brites. Nesse período, despertou seu interesse e se aprofundou na área de Sensoriamento Remoto, através do livro “Remote Sensing and Image Interpretation”[7], que passou a ser um referencial importante em sua trajetória acadêmica.
Participou ativamente do Programa Gilberto Melo, do Conselho de Extensão da UFV, onde equipes de estudantes da UFV, nas mais variadas áreas do conhecimento, assessoravam as prefeituras de pequeno porte na Zona da Mata Mineira (ANEXO, Pag. 572-577). Carlos atuou realizando levantamentos topográficos[8] e, a partir desses, executou locações de vias, promoveu o ordenamento fundiário e projetou loteamentos populares, como também atuou na organização de suas bases cadastrais.
Na graduação, também teve ótimo desempenho concluindo o curso de Engenharia de Agrimensura em 4,5 anos e obtendo excelentes conceitos[9] (ANEXO, Pag. 65-67).
4. Mestrado
No segundo semestre de 1990, Carlos mudou-se para a cidade do Rio de Janeiro – onde morou com sua irmã mais nova Cristina, na expectativa de se preparar para o mestrado no Instituto Militar de Engenharia (IME). Essa mudança também foi uma sugestão do Prof. Ricardo Seixas Brites, que por sua vez estava saindo para o Doutorado na Colorado State University, nos E.U.A. Nesse período, além de estudar bastante, atuou na Empresa Combo[10], como auxiliar de serviços gerais.
Após um mês de rigorosos nivelamentos e exames, já em Janeiro de 1991, Carlos foi aprovado em primeiro lugar no processo de seleção do mestrado do IME em Sistemas e Computação – Cartografia Automatizada, e recebeu uma bolsa de mestrado do CNPq (Figura 4).

Figura 4 – Mestrado no Instituto Militar de Engenharia (IME), 1991 – 1992.
Durante seu treinamento de mestrado, cursou diversas disciplinas, mas a de processamento de imagens, ministrada pelo Professore Antônio José Machado e Silva (IBM), foi a que mais lhe motivou a seguir nessa linha de pesquisa. Nessa época teve contato com diversas publicações na área de sensoriamento remoto, mas uma em especial lhe chamou mais a atenção, o Livro: “Computer Processing of Remotely-Sensed Images”[11], que apresentava diversos conceitos de sensoriamento remoto, do ponto de vista da implementação de algoritmos, que era a estratégia de aprendizado do Prof. Paul M. Mather: “…visualizar a solução do problema, para implementar algoritmos computacionais e fixar o conhecimento…” (Figura 5). Esse princípio do Prof. Mather já vinha sendo seguido por Carlos, ainda que intuitivamente.
Figura 5 – Capa do livro do Prof. Paul M. Mather.
Assim, durante seu treinamento no IME, foram implementados programas, em linguagem C padrão, tanto para as disciplinas do curso de pós-graduação como para a sua dissertação.
O título de sua dissertação foi: “Técnicas de Classificação Não-Supervisionada para Imagens Multiespectrais”, que envolvia a classificação de imagens de satélites usando redes neurais e outros algoritmos não supervisionados.
O trabalho foi competentemente orientado pelos Professores Antônio José Machado e Silva (IBM) e Cel. Paulo Roberto Leal Menezes (IME). E, apresentava alternativas para a classificação de imagens digitais de satélite, utilizando algoritmos computacionais tradicionais como: k-Média, ISODATA, entre outros. Além disso, introduziu a novidade do momento: redes neurais artificiais, que representou uma excelente contribuição na área de sensoriamento remoto no Brasil, considerando que na época não existiam simuladores disponíveis de redes neurais[12] e o melhor computador disponível era um PC com processador 286.
Durante o seu treinamento de mestrado ministrou aulas de linguagem de programação e computação gráfica no Instituto Brasileiro de Pesquisa em Informática (IBPI) e para cursos de graduação na Faculdade da Rede MV1.
Concluiu com êxito o mestrado em Sistemas e Computação (Cartografia Automatizada) em abril de 1993 no IME (ANEXO, Pag. 64).
5. Doutorado
No Início do ano de 1996, Carlos foi visitar duas universidades na Inglaterra: A Universidade de Reading e a Universidade de Nottingham, para decidir onde iria realizar seu treinamento de doutorado. As duas universidades causaram muito boas impressões, mas a recepção do Prof. Paul M. Mather em Nottingham foi um diferencial, pois não só o acolheu muito bem, como também lhe entregou uma carta de aceite para o treinamento na Universidade de Nottingham.
De janeiro de 1997 a janeiro de 2001 realizou seu treinamento na Inglaterra, com bolsa da Capes, em nível de doutorado, quando obteve o título de Ph.D. em Geografia Física (Sensoriamento Remoto do Meio Ambiente) pela Universidade de Nottingham em dezembro de 2000 (Figura 6).
Figura 6 – Ph.d. na Universidade de Nottingham, 1996 – 2000.
Durante esse período desenvolveu a tese com o título: “Accuracy of Remotely Sensing Classification of Agricultural Crops: A Comparative Study”, sob a orientação do Prof. Paul M. Mather, que compartilhava sua visão de que “para conhecer bem um problema, precisaria implementar uma solução através de algoritmos computacionais”. Assim, iniciou seu treinamento se aprofundando e desenvolvendo rotinas computacionais para processar imagens digitais de satélite em ambiente UNIX (Workstation Sun) em linguagem de programação C padrão.
Carlos participou pela primeira vez de um congresso internacional para estudantes de pós-graduação na Universidade de Oxford, onde apresentou resultados preliminares de um ano de pesquisas em Nottingham[13]. Foi surpreendido com diversos questionamentos de professores daquela instituição (Figura 7). Cada um desses pontos arguidos se transformara posteriormente – após discussão com seu orientador – em capítulos de sua tese.

Figura 7 – Participação de Congresso internacional para estudantes de pós-graduação na Universidade de Oxford.
A tese tratava do problema geral da classificação de culturas agrícolas utilizando produtos do sensoriamento remoto. E, concentrava-se sobre a temática específica de capturar a variação espectro-temporal de uma dada cultura ao longo de seus estágios fenológicos de crescimento, como também combinando dados de vários sensores, e utilizando diversos classificadores.
O sensoriamento remoto tem sido uma importante fonte de dados para muitas aplicações agrícolas, incluindo o monitoramento da produção e previsão de safras. Muitas empresas e governos necessitam de uma previsão de safras para planejar suas necessidades em termos de processamento e comercialização. Apesar do sensoriamento remoto sub-orbital já ser uma ferramenta bem estabelecida de previsão para aplicações agrícolas, esses métodos tradicionais não são capazes de cobrir áreas extensas. Assim, o Sensoriamento Remoto expandiu suas fronteiras para incorporar imagens a partir de plataformas orbitais, uma vez que estes tipos de imagens podem proporcionar uma melhor amostragem estatística e periodicidade para extensas áreas (Figura 8).

Figura 8 – No Office e no Lab.
A área de estudo selecionada para desenvolver o doutorado estava localizada perto de Littleport (Ely), em East Anglia, no Reino Unido (Figura 9). Foram utilizadas imagens nas bandas ópticas dos sensores Landsat TM e SPOT HRV de maio a agosto de 1994. Além disso, relatórios de cultivos, para o mesmo ano, foram coletadas dos agricultores em viagens a campo com seu orientador, para gerar os dados de referência para validação da metodologia.
Figura 9 – Realizando coleta de dados em campo com o Prof. Paul M. Mather.
A pesquisa foi realizada em quatro etapas principais: Inicialmente foi desenvolvida uma nova abordagem de análise espacial, que usou as assinaturas espectro-temporais de imagens do sensoriamento remoto multisensor, geradas pela interpolação espectral e temporal de uma superfície de imagens multiespectral/multitemporal, a fim de aperfeiçoar o processo de classificação. Essa etapa também envolveu uma revisão dos métodos mais utilizados para classificação as culturas agrícolas. A segunda etapa envolveu uma revisão abrangente dos métodos que estavam obtendo êxito para combinar o resultado de vários classificadores. A terceira etapa analisou os métodos estatísticos tradicionais (não espaciais) para a avaliação da precisão dos produtos do sensoriamento remoto, como também propôs métodos alternativos para avaliar a precisão temática das imagens classificadas. Finalmente, a última etapa concentrou-se no exame da eficiência da utilização de estratégias espectro-temporais para a classificação de culturas agrícolas, realizando uma investigação sistemática dos custos absolutos (tempo de computação) e relativos (melhoria de exatidão) envolvidos na incorporação da dimensão temporal no processo de classificação de culturas. A conclusão dos experimentos realizados indicou que a combinação de informação espectral, temporal e contextual (espacial) na maioria dos casos produz maior precisão no processo de classificação. No entanto, também ficou claro que um bom desempenho na classificação é altamente dependente da escolha adequada das variáveis discriminantes e de um modelo de classificação apropriado com seus parâmetros. Além disso, o desempenho não é apenas uma questão de capacidade de algoritmo, mas também é afetada por outros fatores de custos subjetivos, como requisitos de treinamento dos usuários.
Nesse período de treinamento, Carlos participou de vários congressos em diversos países, apresentando artigos científicos relatando seus resultados parciais da pesquisa:
VIEIRA, C. A. O. and KAVZOGLU, T. (1998) Using multitemporal, multispectral and multisource remotely-sensed data to classify crops: An innovative approximation. Proceedings of the Remote Sensing Society Student Conference (Developing Space’98), April 23, Department of Zoology, University of Oxford, Oxford, 47-52 (Figura 7).
KAVZOGLU, T. and VIEIRA, C. A. O. (1998) An analysis of Artificial Neural Network pruning algorithms in relation to land cover classification accuracy. Proceedings of the Remote Sensing Society Student Conference (Developing Space ’98), April 23, Department of Zoology, University of Oxford, Oxford, 53-58.
VIEIRA, C. A. O.; MATHER, P.M.; TSO. B.; McCULLAGH, M. (1998) Using multi-temporal, multi-spectral and multi-source remotely-sensed data to classify agricultural crops. The 24th Annual Conference and Exhibition of the RSS98 (Developing International Connections), 9th – 11th September, The University of Greenwich, Kent, UK, 354-360.
VIEIRA, C. A. O. and MATHER, P. M. (1999) Assessing the accuracy of thematic classifications using remotely sensed data. In Proceedings of the 4th International Airborne Remote Sensing Conference and Exhibition/21st Canadian Symposium on Remote Sensing, Ottawa, Ontario, Canada, 21-24 June 1999, Vol. II, 823-830 (Figura 10).
VIEIRA, C. A. O., and MATHER, P. M. (1999) Techniques of combining multiple classifiers in Remote Sensing. RSS99 – From data to Information, Proceedings of the 25th Annual Conference and Exhibition of the Remote Sensing Society, University of Cardiff, 8-10 September 1999, 387-394.
VIEIRA, C. A. O. and MATHER, P. M. (1999) Visualising the spatial accuracy of classified images. RSS99 – From Data to Information, Proceedings of the 25th Annual Conference and Exhibition of the Remote Sensing Society, University of Cardiff, 8-10 September 1999, 897-904.
JAAFAR, J., PRIESTINALL, P., MATHER, P. M., and VIEIRA, C. A. O. (1999) Construction of DEM from LiDAR DSM using morphological filtering, conventional statistical approaches and artificial neural networks. RSS99 – From Data to Information, Proceedings of the 25th Annual Conference and Exhibition of the Remote Sensing Society, University of Cardiff, 8-10 September 1999, 299-306.
VIEIRA, C. A. O. and MATHER, P. M. (2000) On the assessment of the spatial reliability of thematic images. In GIS Research UK – GISRUK2000 – Conference Proceedings, The University of York, UK, 5-7 April 2000, 191-194.
VIEIRA, C. A. O. and MATHER, P. M. (2000) Visualisation of Measures of Classifier Reliability and Error in Remote Sensing. In G. B. M. Heuvelink, and M. J. P. M. Lemmens (Eds.), ICG Accuracy 2000, Amsterdam: Delft University Press, The Netherlands, 701-708.
VIEIRA, C. A. O., MATHER, P. M., and McCULLAGH, M. (2000) The Spectral- Temporal Response Surface and its use in the multi-sensor, multi-temporal classification of agricultural crops. In ISPRS: IAPRS, Vol. XXXIII, Part B2, Amsterdam, The Netherlands, 16-23 July 2000, 582-589.
VIEIRA, C. A. O. and MATHER, P. M. (2000) A comparative study of multiple classifier combination methods in Remote Sensing. In Proceedings of the ICAI’ 2000 International Conference, Vol. I, Las Vegas, NV, USA, 26-29 June 2000, 39-46.
VIEIRA, C. A. O. and MATHER, P. M., 2000, An examination of the effectiveness of multitemporal crop classification. Proceedings of the 26th Annual Conference and Exhibition of the Remote Sensing Society, University of Leicester, 12-14 September 2000.
VIEIRA, C. A. O. and MATHER, P. M. (2001) On the Assessment of Spatial Reliability of Thematic Images. In: Innovation in GIS: Spatial Information and the Environment. 1ª ed. London: Taylor and Francis, 2001, v.8, p. 120-135. (selected from GIS Research UK – GISRUK2000 – Conference Proceedings).
VIEIRA, C. A. O.; MATHER, P. M; APLIN, P (2002) Multitemporal Classification of Agricultural Crops Using the Spectral-Temporal Response Surface In: Analisys of Multi-temporal Remote Sensing Images. 1ª ed. London: World Scientific Publishing Co., v.2, p. 290-297.
VIEIRA, C. A. O. and MATHER, P. M. (2001) Validation of Remotely Sensed Data: How Reliable are Image Classification? GIM International: The Worldwide Magazine for Geomatics. Netherland, v.15, p.34 – 37, (condensed article selected from the Accuracy 2000 Conference Proceedings).
VIEIRA, C. A. O., MATHER, P. M., Aplin, P. (2001) Using the Spectral-Temporal signatures of remotely sensed images to optimise crop classification. In Proceedings of the 8th International Symposium Physical Measurements and Signatures in Remote Sensing. CNES – Centre National DÉtudes Spatiales, Aussois, France. p.49 – 54.
Em muitos desses eventos, Carlos interagiu com diversos pesquisadores que trabalhavam em áreas correlatas e que de alguma forma influenciaram positivamente a sua pesquisa, tais como: Prof. Peter Burrough, Prof. Michael Goodchild, Prof. Peter Atkinson, Prof. Gerrard Heuvelink, Prof. Giles Foody, Dr. Gilberto Câmara, Dr. Paul Aplin, Prof. Peter Fisher, entre outros.
Carlos trabalhou também como pesquisador de um projeto de pesquisa da Comunidade Europeia, Extraction and Synthesis of Environmental Information from multi-source data (FET-ENVIS). Esse trabalho foi desenvolvido a partir de uma colaboração entre as Universidades de Nottingham na Inglaterra, Universidade de Bergen na Noruega, e Universidade de Bohum na Alemanha (ANEXO, Pag. 78-80).
Foi Tutor Residente no Rutland Hall (moradia estudantil) da Universidade de Nottigham de setembro de 1999 até dezembro de 2000 (ANEXO, Pag. 76).
Sua tese foi defendida em 13/12/2000, tendo como examinadores: Dr. M. McCullagh e Prof. G. Wilkinson, e após uma hora e quarenta minutos de arguições, a tese foi aprovada sem correções e posteriormente recebeu o título de PhD em Geografia Física (ANEXO, Pag. 60-63).
Figura 10 – Apresentação de artigo caracterizado de “Robin Hood” na Universidade de Ottawa.
6. Pós-Doutorado
No período de Agosto de 2005 a Julho de 2006, Carlos foi realizar seu treinamento de pós-doutorado na área de Geomática na Universidade de Melbourne na Austrália, com bolsa do CNPq (Figura 11).
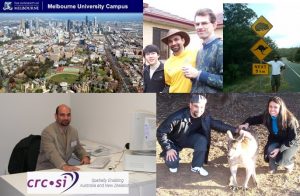
Figura 11 – Post-Ph.d. na Universidade de Melbourne, 2005 – 2006.
O seu projeto de pesquisa estava vinculado a um projeto mais amplo registrado na Australian Research Council, pertencente ao Governo Australiano, sob número de contrato No. DP0555957 e coordenação do Prof. Stephan Winter, cujo título era: “Piggy-back travelling on individual transport hosts (PATHS)”.
O projeto de pesquisa proposto originalmente tinha um enfoque direcionado principalmente para implementar um protótipo capaz de estimar tempos de chegada numa rede de transporte tempo-dependente e dinâmica, considerando a segurança de conexões (baldeações) entre veículos, por meio de um algoritmo capaz de definir uma sequência de arcos, através dos quais, um cliente deseja atingir um destino específico, num curto período de tempo, com baixo custo e alta confiabilidade.
Entretanto, ao se avaliar o estágio de desenvolvimento do projeto – considerando que o mesmo havia iniciado 10 meses antes, quando estava originalmente previsto o início do treinamento do bolsista (outubro de 2004) – constatou-se que esta fase de implementação de protótipo já estava em fase avançada. E assim, seria interessante a contribuição do pesquisador em outra fase do projeto, onde trabalharia com simulações de monitoramento das atividades e segurança, no contexto de uma rede de transporte compartilhado tempo-dependente e dinâmica.
Se por um lado este fato impediu a participação direta no desenvolvimento dos protótipos, conforme previsto no projeto submetido ao CNPq, por outro lado permitiu ao pesquisador ter contato com novas tecnologias e ambiente de simulação[14], o que também compunha um dos objetivos principais do programa pretendido. Outro ponto importante foi que nesta fase de desenvolvimento do projeto, o pesquisador teve contato com esses protótipos na fase final de desenvolvimento, e rever as fases iniciais, porque os códigos estavam devidamente documentados.
Pelo exposto, e em comum acordo com o seu orientador, optou-se na época por avançar para o próximo estágio do projeto e trabalhar com simulações em sistemas compartilhados de redes de transporte tempo-dependente e dinâmicas, com ênfase na confiabilidade de uso desses sistemas.
Assim, o objetivo do projeto de pesquisa passou a ser o de desenvolver uma estratégia de reconstrução das viagens compartilhadas para um investigador autorizado numa rede móvel de geosensores. E neste caso a hipótese seguiu duas direções:
(i) se não for dada evidências falsas, as evidências coletadas são sempre suficientes para reconstruir a viagem compartilhada completamente, e que;
(ii) se falsa evidência é dada, as informações coletadas permite, pelo menos, desmascarar o agente que deu essa evidência falsa.
Torna-se oportuno mencionar que no escopo desse projeto não foi dada nenhuma ênfase às diversas estratégias para comunicação eficiente entre agentes, o que poderia ser desenvolvido em trabalhos futuros.
Para validar efetivamente essa hipótese, foi necessário explorar e trabalhar algumas questões de pesquisas, tais como:
- Que tipo de informação sobre as viagens compartilhadas deveriam ser armazenadas na memória local dos agentes?
- Como poderiam essas bases de dados locais serem estruturadas, implementadas, atualizadas e consultadas?
- Como poderia o investigador autorizado analisar as evidências coletadas?
- Como o sucesso de uma investigação pode ser afetado pela densidade de agentes, tempo de desconexão, e outros parâmetros?
Durante todo treinamento, Carlos apresentou seminários de pesquisa para o Cooperative Research Centre (CRC) for Spatial Information (SI) e para o departamento de Geomática da Universidade de Melbourne: 1. “The shared ride traveling component: identifying the problem and hypothesis research questions” (01/09/2015); 2. “Monitoring AD-DOC mobile geosensor network Traveled trajectories” (01/12/2005); 3. “Reconstructing shared rides in a mobile geosensor network” (06/04/2006); e 4. “Reconstructing shared rides in a mobile geosensor network” (25/05/2006).
Além dos seminários internos do Departamento de Geomática da Universidade de Melbourne, Carlos participou ativamente de seminários específicos do grupo de pesquisa. Nesses seminários, o grupo sistematicamente se reunia para discutir artigos científicos de relevância dentro da área de pesquisa. A cada semana um membro do grupo era escolhido para fazer a introdução do artigo antes das discussões. Esses seminários no Departamento de Geomática lhe possibilitou uma excelente interação com pesquisadores de sua área de pesquisa (Professor Clive Fraser, Dr. Simon Jones – RMIT, entre outros), como também de outras áreas de interesse como Cadastro Técnico Multifinalitário (Prof. Ian Williamson, Prof. Abbas Rajabifard, entre outros).
Carlos também coorientou a tese de doutorado da acadêmica, Mrs. Supawan Wongprayoon, na Universidade de Melbourne com o título: “Coral Reefs Monitoring Using Remote Sensing” (ANEXO, Pag. 59). Teve a oportunidade de lecionar por seis meses a disciplina de introdução à linguagem de programação para alunos de graduação em Geomática (ANEXO, Pag. 59), sendo bem avaliado pelos alunos do Departamento de Geomática da Universidade de Melbourne[15] (Figura 12). O treinamento foi concluído com êxito em Julho de 2006 (ANEXO, Pag. 59).

Figura 12 – Ministrando aulas de programação na Universidade de Melbourne, 2006.
[1] A sua irmã Helena substituía a Profa. Cecília, em licença maternidade.
[2] O Presidente Sarney regulamentou a Lei nº 5.524, de 5 NOV 1968, através da criação do Decreto Nº 90922 (06/02/1985) que “dispõe sobre o exercício da profissão de técnico industrial e técnico agrícola de nível médio ou de 2º grau”, motivando a formação profissionalizante.
[3] Outros serviços voluntários envolviam: pinturas de meio fio, alimentar animais, etc. – durante os finais de semana e feriados.
[4] Atualmente é Professor do Instituto de Geociências da Universidade de Brasília (UNB).
[5] Grande parte dos cursos de graduação anteriormente eram estruturados em cursos tecnólogos superiores, com duração de três anos e meio, a partir de 1985 as cargas horárias e as grades dos cursos de engenharias foram ajustadas para um curso pleno de Engenharia com cinco anos de duração.
[6] Curso de Choro e Seresta do Prof. Zé Boia.
[7] Lillesand e Kiefer (1979) Remote Sensing and Image Interpretation. Editado pela John Wiley & Sons, Inc. New York (ISBN 0-471-08211-2).
[8] Levantamentos Planimétricos, Altimétricos e Planialtimétricos.
[9] Em mais de 50% das disciplinas cursadas obteve conceito A.
[10] A Empresa COMBO pertencia ao Sr. Ary Ackerman, pessoa que o influenciou positivamente e o motivou bastante a perseguir seus objetivos.
[11] Paul M. Mather (1987) Computer Processing of Remotely-Sensed Images. Editado pela John Wiley & Sons, Inc. Chichester, UK (ISBN 0-471-98550-3).
[12] Todos os códigos foram implementados por Carlos na linguagem de programação C padrão.
[13] VIEIRA, C. A. O. and KAVZOGLU, T. (1998) Using multitemporal, multispectral and multisource remotely-sensed data to classify crops: An innovative approximation. Proceedings of the Remote Sensing Society Student Conference (Developing Space’98), April 23, Department of Zoology, University of Oxford, Oxford, 47-52 (Figura 7).
[14] Linguagem de programação Java Script e Ptolomeu II – que é um ambiente de simulação de código aberto que suporta a experimentação com projeto orientado a objetos (http://ptolemy.berkeley.edu/ptolemyII/).
[15] Ficou em 3° lugar entre os professores melhor avaliados pelos alunos de graduação no Departamento de Geomática da Unimelb.